
Le tesine di fine anno di quinta sono la finalizzazione di tutti i saperi e di tutte le competenze acquisite durante il triennio di indirizzo. Utilizzando i contenuti di “Laborobotica”, e permutandoli fra di loro, gli allievi sono riusciti a realizzare progetti molto articolati, che potrebbero ben figurare in qualsiasi ambiente di lavoro. Durante la realizzazione di questi elaborati, gli studenti si sono dovuti confrontare con problemi nuovi e complessi che ne hanno stimolato la crescita individuale e le abilità nel problem-solving.
Jaskaran Singh
AIR ONE
Il progetto presenta diversi obiettivi legati alla misurazione della qualità dell’aria e di altri parametri fondamentali per una corretta valutazione dell’ambiente circostante. Per maggiori informazioni potete visionare il mio canale You Tube
https://www.youtube.com/watch?v=4a_g3ipw3z0&ab_channel=JaskaranSingh
o consultare il mio sito web
Cristian Faceto
VISIONHAND CONTROL
Nel mondo dell’automazione e della robotica, l’interazione uomo-macchina ha tradizionalmente richiesto l’uso di dispositivi di controllo esterni come joystick, tastiere o mouse. Tuttavia, con l’avvento dell’intelligenza artificiale e dei sensori di visione, stiamo assistendo a un’evoluzione significativa in questo campo.
VisionHand Control rappresenta un passo avanti in questa direzione, sfruttando l’intelligenza artificiale per rilevare e tracciare i movimenti delle mani attraverso l’uso della webcam del PC. Questi movimenti vengono quindi utilizzati per controllare un braccio antropomorfo (detto manipolatore), consentendo un’interazione intuitiva e diretta con la macchina.
Andrea Saggiorato
BRACCIO ROBOTICO
Fin da piccolo sono rimasto affascinato dai manipolatori, capaci di svolgere in modo autonomo gran parte delle azioni umane. Con gli anni ho compreso che oltre alla bellezza estetica, la robotica può anche essere una componente di notevole utilità all’interno delle industrie. Il mio progetto consiste nel creare un braccio robotico che vada ad automatizzare i processi di costruzione aziendale, e che evitando l’impiego diretto di un essere umano garantisca contemporaneamente una maggiore sicurezza.
Enrico Bussola
ROBOT PER ISPEZIONE TUBATURE
Il progetto che ho realizzato è un trattore sterzante con telecamera PAN e tamburo avvolgicavo. La funzione per la quale ho pensato questo sistema è quella di ispezionare tubazioni come fognature, tubi dell’acqua etc. per poterne visionare lo stato e individuare eventuali Problemi al loro interno o della loro struttura. Durante la mia esperienza di PCTO ho lavorato presso un’azienda che si occupa di telecamere per videoispezioni e ho pensato di progettarne una versione gestita con Arduino e che montasse a bordo dei sensori per il rilevamento ambientale all’interno dei tubi.
Matteo Amoroso
COLOR CASCADE
Come progetto finale ho pensato di realizzare uno smistatore di oggetti colorati; quest’idea è nata dall’esigenza di automatizzare ciò che per me è sempre stato noioso fare: sistemare cioè gli oggetti una volta utilizzati. Bene, proprio per questo è nato questo smistatore, il quale mi permette di suddividere ad esempio i mattoncini Lego in modo automatico, ma non solo, anche altre cose che hanno differenti colori.
Matteo Lupi
COIL WINDER
Questo progetto è stato realizzato in seguito all’esperienza svolta durante il PCTO nell’estate 2023. Si tratta di un coil winder, ossia una ribobinatrice; è questa una macchina utilizzata per avvolgere fili conduttori intorno a un nucleo per creare bobine e avvolgimenti. La sua funzione principale è quella di avvolgere il filo in modo uniforme e controllato, seguendo un modello specifico. Questo processo è essenziale per la produzione di componenti elettronici e sistemi elettromeccanici che richiedono bobine con caratteristiche precise, come induttori, trasformatori, solenoidi e motori elettrici.
Crippa Leonardo
GARAGE GTA5
Il Progetto consiste nella riproduzione di un garage di forma circolare su più piani (2), avente un ascensore al centro per permettere la salita e la discesa dei veicoli. Il modello da seguire è stato preso da un videogioco, ossia GTA 5 (Grand Theft Auto 5), nello specifico la struttura rappresenta il garage dell’ufficio del CEO.
Simone Airoldi
APERTURA DI SICUREZZA
Il progetto riguarda una tecnologia proiettata verso il futuro dei dispositivi di sicurezza per le abitazioni. Il mio intento è stato quello di creare un sistema di accesso protetto. Il progetto prevede l’uso di un sensore di impronte digitali per aprire un cancello, qualora l’impronta corrisponda a quella registrata.
Paolo Amendola
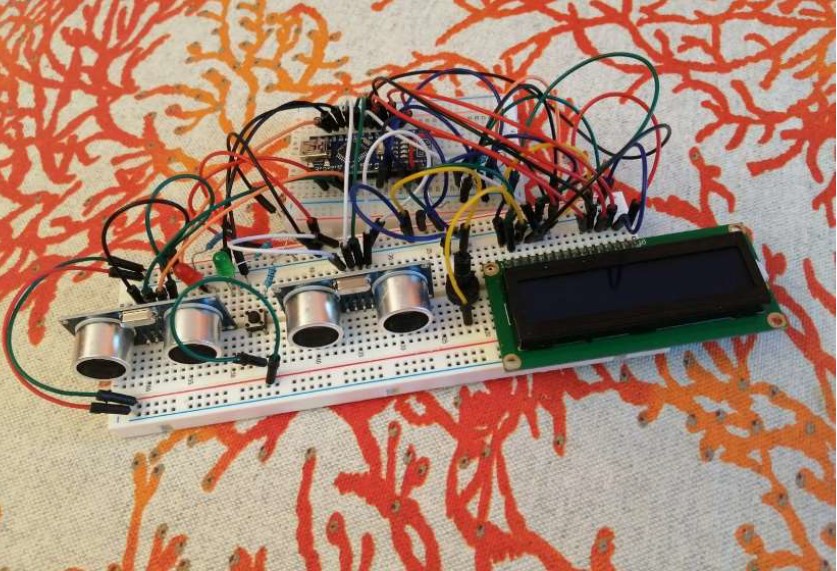
BASTONE INTELLIGENTE PER NON VEDENTI
Questo progetto mira alla realizzazione di un bastone per persone con disabilità visiva, in grado di riconoscere un ostacolo ad una distanza programmabile attraverso l’emissione di un segnale acustico. L’idea è quella di risolvere problemi a persone ipovedenti, provvedendo alla loro sicurezza in ambienti estranei.
De Giuli Filippo Villani Nicolò
LIEVITATORE AD ULTRASUONI
L’obiettivo primario di questo progetto è l’applicazione pratica dei principi fisici che stanno alla base del levitatore ad ultrasuoni, ottimizzando i costi senza sacrificare la qualità e l’efficacia del risultato finale. In questa tesina, esploreremo in dettaglio il funzionamento del levitatore, analizzando le sue applicazioni pratiche e il processo di progettazione che lo rende accessibile anche per realizzazioni con risorse limitate. Abbiamo scelto questo progetto perchè riteniamo sia molto efficiente, sostenibile, e soprattutto di forte impatto visivo.
Marco Perotti
PAN-TILT LASER
Un pan-tilt è un meccanismo utilizzato per orientare o posizionare un dispositivo in due direzioni, orizzontale (pan) e verticale (tilt). Questo tipo di sistema consente di controllare con precisione l’angolo di visualizzazione o l’orientamento di una telecamera, un sensore, un laser o qualsiasi altro dispositivo montato su di esso.
Paolo Modafferi
MAGAZZINO AUTOMATICO
Il progetto consente l’organizzazione di una cassettiera con l’ausilio di un manipolatore. Gli oggetti (disposti nei cassetti) verranno individuati automaticamente, in modo che l’operatore non debba preoccuparsi del loro stoccaggio; provvederà il braccio robotico al posizionamento.

Kevin Bellani
SISTEMA DI MISURAZIONE REMOTO DI TEMPERATURA DELL’ACQUA CON CONTROLLO DA SMARTPHONE
Il progetto misura la temperatura di un liquido, attraverso l’immersione di 2 sonde, inserite in un’asta forata avvitata all’asse di un servo motore, che ne consente il movimento. Questo sistema potrebbe essere utilizzato dall’industria per monitorare la temperatura di un liquido che non deve superare un certo valore. Il monitoraggio di questo parametro può essere eseguito via Bluetooth se ci si trova nei pressi della macchina, oppure a distanza, basta che la scheda elettronica sia collegata ad un WiFi nelle vicinanze, così da poter spedire i dati su internet. Potrebbe inoltre essere adoperato in ambito culinario, per tenere sotto controllo la temperatura di ebollizione di acqua, dell’olio ecc. Infatti, basta aprire l’applicazione (realizzata ad hoc con App Inventor) e controllare a distanza le temperature che si aggiornaneranno in tempo reale. I grafici dinamici vengono inviati ad un sito web appositamente creato tramite Altervista, un portale online gratuito, che permette di creare siti con domini di terzo livello.
Contenuti presenti in “Laborobotica”: Arduino, ESP01, HC05, controllo di servomotori, sensore DS18B20, App Inventor, costruzione di siti web.
Cristopher Selvaggio
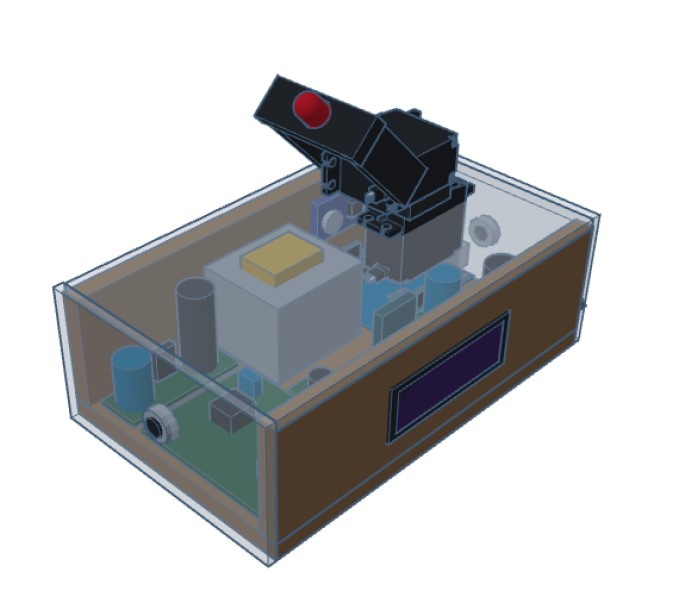
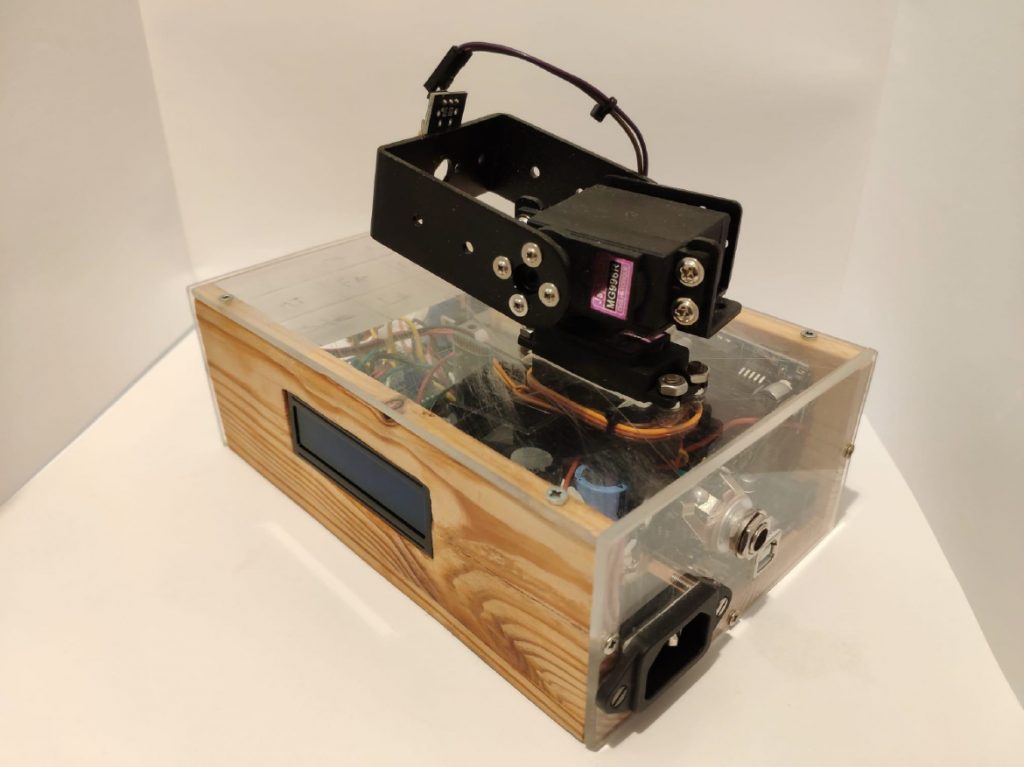
TUNE TILT
Il Tune Tilt è un pedale per chitarra che comanda un braccio robotico. Il suo funzionamento si basa sulla comunicazione fra lo strumento e Arduino, al fine di far interagire i diversi componenti del progetto. Il Tune Tilt ha, dunque, la doppia valenza di pedale accordatore comunicante con app e di rilevatore di frequenza in grado di indicare la nota eseguita tramite un braccio meccanico.
La logica di funzionamento del sistema è la seguente: il segnale, che dallo strumento viene trasferito al microcontrollore mediante un jack audio, passa attraverso un preamplificatore in modo da renderlo compatibile con Arduino il quale provvederà a trasformarlo da analogico a digitale mediante l’ADC interno. Questo dato, viene poi campionato ricavandone periodo e frequenza. Il valore della frequenza viene visualizzato su di uno schermo LCD I2C e viene inviato anche ad un dispositivo pan-tilt con puntamento laser, che indicherà su di una griglia la nota suonata. Tramite un HC-05 la frequenza della nota suonata viene inviata ad una applicazione, realizzata con App-Inventor che funziona da accordatore. Nell’applicazione è disponibile una versione in Cinese, che traduce tutte le scritte e il nome delle note.
Contenuti presenti in “Laborobotica”: Arduino, HC05, display LCD I2C, controllo di servomotori, studio della cinematica inversa, App Inventor. La documentazione sul pan-tilt è presente nella voce di menù del sito.

Simone Finotti
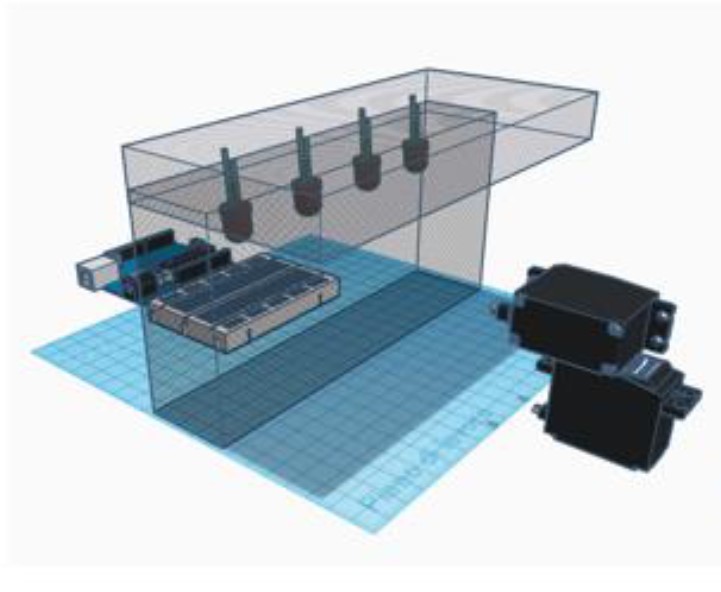
SPOTLIGHT: SISTEMA DI REGIA LUCI DI UN PALCO CON LED RGB E TESTA MOBILE “PAN-TILT” GESTITO DA APPLICAZIONE ANDROID
Il progetto è stato concepito con l’intento di produrre un elaborato in cui venissero utilizzate le competenze acquisite nel corso degli anni, inoltre volevo realizzare un progetto inerente al settore di cui vorrei occuparmi in futuro: il cinema e il teatro.
Si tratta di un faro da palcoscenico, al di sopra del quale sono posti 4 led RGB in grado di cambiare colore generando effetti luminosi. Il sistema di puntamento è costituito da una struttura pan tilt composta da due servomotori.
Il movimento del faro è controllato da un joystick, che sfrutta la cinematica diretta per direzionare il faro variando il valore della x e della y.
L’intero sistema è controllato da un’applicazione Android che attraverso la comunicazione Bluetooth si interfaccia ad Arduino, la famosa scheda elettronica dotata di microcontrollore che abbiamo imparato a programmare nel corso degli anni. Mediante l’app sarà possibile modificare il colore delle luci sul palco e accendere o spegnere il faro per scollegarlo quando non è in funzione.
Contenuti presenti in “Laborobotica”: Arduino, HC05, controllo di servomotori, studio della cinematica diretta, led RGB, App Inventor. La documentazione sul pan-tilt è presente nella voce di menù del sito.
L’ idea è stata quella di realizzare una sonda spaziale telecomandata a distanza, che tramite una telecamera filma e trasmette in streaming ciò che riprende davanti a sé. Ho preso spunto dal rover che abbiamo progettato in terza superiore costruendone uno molto più evoluto ed efficace, cambiando diversi componenti e aggiungendo funzionalità. C’erano diversi modi per pilotare questa sonda, tramite l’utilizzo del bluetooth o attraverso l’uso di un modulo wi-fi; poiché quest’ultimo inviava i comandi con qualche secondo di ritardo e di conseguenza avrebbe rischiato di scontrarsi con elementi esterni, ho scelto di applicare la prima opzione. Così facendo però non posso telecomandare la sonda ad una distanza superiore ai dieci metri. Tramite il telefono e un applicazione creata attraverso App Inventor il nostro progetto si muoverà in tutti i sensi e grazie ad una telecamera installata sulla parte superiore, denominata Esp 32 Cam si potrà far fermare il rover e scattare una foto. Grazie ad un’ applicazione denominata “Blynk”, si potrà inviare l’immagine ad un cellulare per la visualizzazione.
Invece di utilizzare due servomotori ho utilizzato due motori in continua (chiamati motori dc); per farli funzionare in modo corretto ho utilizzato un driver denominato L293D in modo da poterli utilizzare nei due sensi di rotazione (avanti-indietro). Il controllore utilizzato è l’Arduino Mega interfacciato con un HC05 per le funzionalità bluetooth.

Daniele Bussu
SISTEMA DI CONTINGENTAMENTO ANTICOVID APPLICATO AD UNA PORTA AUTOMATICA CON INTERFACCIA C#
A causa della pandemia il numero massimo di persone in locali chiusi deve essere limitato; per questo, ho creato un sistema in grado di contare quante persone entrano in una stanza. Quando viene raggiunto il numero massimo, l’accesso non sarà più consentito. Questo progetto funziona utilizzando due sensori HC-SR04, un display LCD, un LED verde e uno rosso che simulano un semaforo, un servomotore per la porta scorrevole. Tutto il sistema è controllato da un Arduino Nano. All’avvio del programma, un LED verde si accende. Quando una persona vuole entrare nell’area protetta, il sensore all’ingresso la rileva, la porta si apre e il display incrementa il numero delle persone presenti. Al raggiungimento del numero massimo si spegne il led verde e si accende quello rosso e al rilevamento di una ulteriore presenza la porta non si aprirà: lo farà quando una persona dovrà uscire. Il sensore interno la rileverà e il display decrementerà il numero dei presenti.
Contenuti presenti in “Laborobotica”: Arduino, HC05, controllo di servomotori, display lcd, Visual Studio C#.


Andrea Padoan
ROBOCAP
Il progetto è nato con lo scopo di aiutare un nostro compagno affetto da grave disabilità. Consiste in un cappellino, che grazie ad un accelerometro riesce a rilevare i movimenti del capo. Questo dispositivo permette a chi ha non ha l’uso delle braccia e delle mani di pilotare un mouse, e di conseguenza utilizzare un PC. Il click del mouse viene prodotto da un sensore da tenere tra i denti. Premendolo una volta velocemente equivale a fare un un doppio click con il tasto sinistro, tenendolo premuto per più tempo si effettua un click con il tasto destro. In questa tesina si è utilizzato come attuatore un pan tilt da noi realizzato durante le ore curricolari.
Contenuti presenti in “Laborobotica”: Arduino, controllo di servomotori, studio della cinematica diretta e inversa. La documentazione sul pan-tilt è presente nella voce di menù del sito.

Simone Borsa
LASER SHOOTER
Il progetto si chiama “Laser Shooter”.
Sono stato ispirato da un’attrazione del luna park che mi ha sempre appassionato tantissimo.
Consisteva nello sparare con un fucile ad aria compressa a delle lattine poste a distanza di qualche metro.
Io ho modernizzato questa attrazione, sostituendo il fucile spara pallini con una pistola laser, le lattine con dei sensori di luce e le vecchie lampadine a incandescenza con dei LED.
Il tutto è controllato da una applicazione sullo smartphone.
Valerio Salmoiraghi
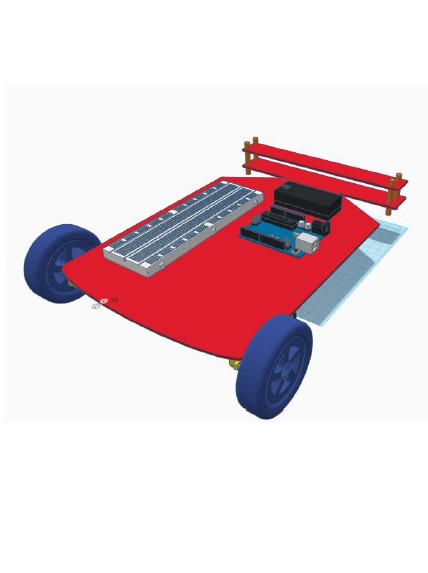
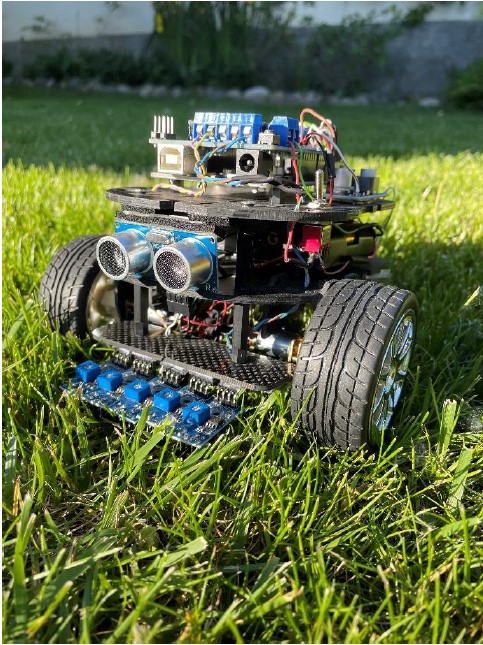
ROVER SEGUILINEA PER AMBIENTI A RISCHIO, STABILIZZATO CON REGOLATORE PID
L’idea iniziale da cui sono partito per lo sviluppo del suddetto sistema automatizzato aveva lo scopo di integrare le conoscenze apprese nel corso del triennio scolastico nell’istituto ITI OMAR in un progetto sviluppabile, grazie a tempo e investimenti, in un prototipo concretizzabile ed eventualmente applicabile in un ambiente reale.
Il progetto mira a limitare i contatti non necessari tra soggetti nell’ambiente ove il rischio di contagio è tra i più alti: gli ospedali.
Si tratta di un dispositivo automatizzato in grado di seguire un percorso preimpostato sul terreno tramite una linea di colore scuro senza necessitare del supporto e/o il controllo di un soggetto umano. Tale dispositivo potrebbe muoversi in ambienti a rischio contagio per trasportare attrezzi, medicinali o dispositivi senza necessitare di un contatto tra pazienti e operatori sanitari.
Esso potrebbe ipoteticamente tornare al punto di partenza e inserirsi in un dispositivo utilizzato per la sua sanificazione: sarebbe sufficiente creare il percorso adeguato a tale funzione. Allo stesso tempo, il dispositivo potrebbe essere utilizzato per eseguire un monitoraggio di temperatura, condizioni dell’aria e altre misurazioni tramite l’integrazione di vari sensori. Ciò potrebbe essere utile per mantenere costante il microclima dell’ambiente sanitario tramite un continuo monitoraggio. I dati rilevati, potranno essere spediti sul web, permettendo la visualizzazione online di un grafico rappresentante l’andamento di tali valori, consultabile direttamente dal nostro cellulare.